




教育方案
国内第一家小型化、原型化、场景化、标准化工业数字孪生平台厂商
四旋翼飞行控制实验平台
一、概述
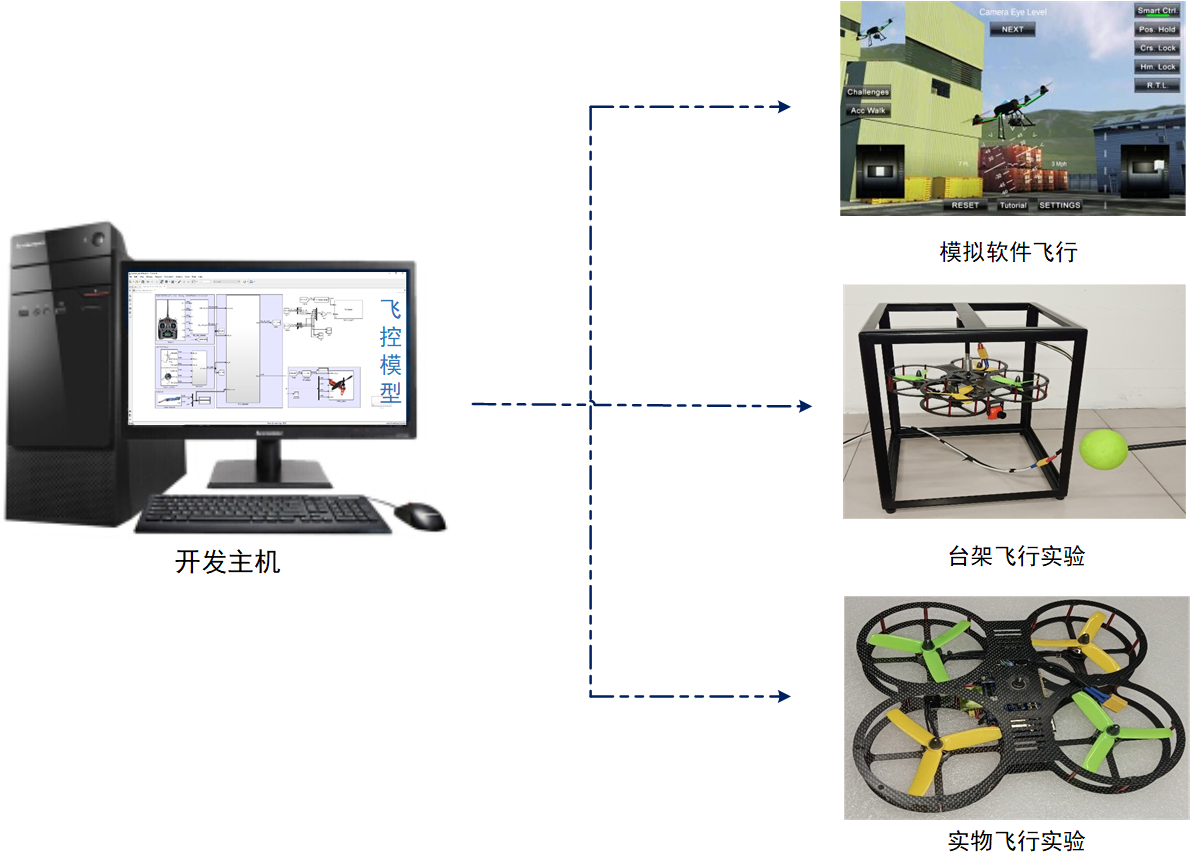
四旋翼飞行控制实验平台是集教学与科研目的为一体的多功能实验台,其在满足日常学生教学实验的同时,兼顾无人机平台姿态控制、制导导航、力学等学科专业的科学研究。本平台采用先进的基于模型的设计(MBD)开发思路,可支撑控制系统数学仿真实验、模拟软件飞行实验、台架实验、实物飞行实验,具备模型编译、下载、数据监视记录、后处理等完成的工具软件,能够帮助学生熟悉整套控制系统设计流程。
二、特征优势
(1)基于模型设计(MBD)
平台采用先进的基于模型设计(MBD)的开发思路;
(2)实验支撑
同时支持数学仿真实验、模拟软件飞行实验、台架实验和实物飞行实验;
(3)硬件配置
主控芯片采用功能强大和扩展性强的芯片AM335x 1GHz ARM® Cortex-A8 processor,拥有丰富的外设资源和强大的运算能力;
(4)图像处理
具备前置摄像头,结合专用图形处理芯片,完成图像采集和实时处理;
(5)控制器开发
结合基于MATLAB/Simulink、MWORKS 和ARM的快速控制原型系统的使用,可以快速实现控制器的开发,自动代码生成。
三、实验内容

四、实验示例
(1)IMU数据获取与姿态解算
1)实验目的
❉熟悉IMU传感器基本原理;
❉学习基本kalman滤波的原理和应用。
2)实验原理
飞行器姿态(滚转、俯仰、偏航角)测值并非直接来源于机上传感器,而是依据姿态测量原理,由集成传感器的原始测值经过‘vehicle_attitude’模块内置姿态计算方法计算后得到。该模块内置了两种姿态计算方法,基于加速度计、陀螺仪和磁力计测值的默认计算方法和扩展卡尔曼滤波器(Extended Kalman Filter)。
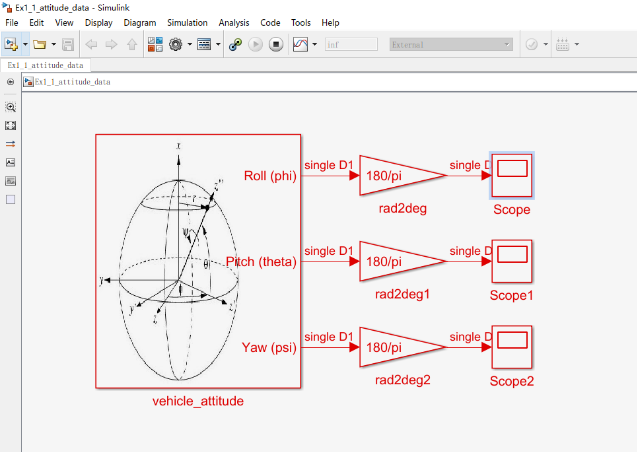
姿态测量模型
3)实验过程
A.数值仿真实验
Step1: 直接运行
Step2: 打开示波器,结果如下图所示,从结果可以看出,估计值能够很好的符合实际值。
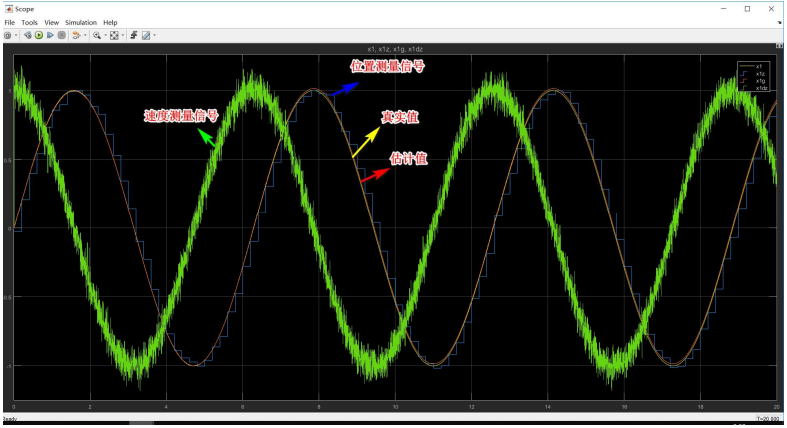
卡尔曼数值仿真实验结果
B.台架实物实验
Step1: 打开Simulink模型
Step2: 无人机实物上电
Step3: 编译下载模型,上传固件信息
Step4: 手动摆动四旋翼,在Simulink监控界面观察上传的四旋翼姿态数据
Step5: 停止模型
Step6:关闭无人机。
2、基于颜色的绿球跟踪实验
1)实验目的
❉了解跟踪控制基本原理
❉了解图像处理基本过程
❉了解分层控制器的设计思想
2)实验原理
以前置相机中的绿球为跟踪对象,其目的是保持绿球在图像的中心位置(坐标原点)。当绿球在图像中左右移动时会产生一个x方向的位移,将此作为偏差输入PID控制器产生一个偏航角的控制量,作为姿态控制器的期望值。当绿球在图像中上下移动时会产生一个y轴方向的位移,将此作为偏差输入PID控制器产生一个俯仰角的控制量,作为姿态控制器的期望值。经过两个PID控制器,将使得绿球能够保持在图像的中心,移动绿球,无人机的机头就会跟随移动,这就是绿球跟踪的基本原理。
如下图所示,绿球跟踪控制系统采用分层控制思想,最上层为绿球跟踪控制器(BBB板载ARM处理器),最下层为无人机姿态控制器(BBB板载GPU处理器),上层的控制器输出作为下一层控制器的给定输入。
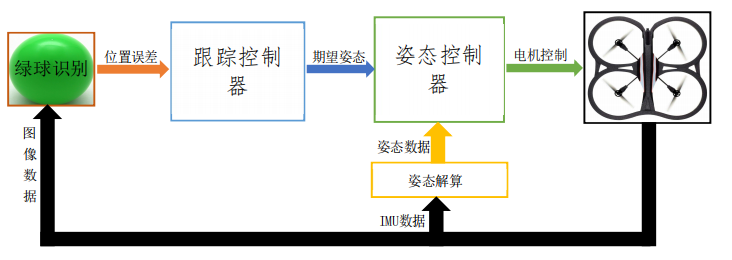
绿球跟踪控制系统原理图
3)实验过程
Step1:打开模型
Step2:无人机实物上电
Step3:编译下载模型,上传固件
Step4:运行模型
Step5:运动绿球,观察无人机跟踪情况
Step6:调整PID控制器参数,优化跟踪效果
Step7:停止模型
Step8:关闭无人机
4)实验讨论:
❉分层控制的设计思路和特点
❉将颜色跟踪改为形状跟踪甚至人脸跟踪等。
五、选型配置
产品名称 | 产品型号 | 系统配置 | |
四旋翼飞行控制实验平台 | LINKS-ES-UAV-01(基础教学) | 无人机实验台架 | Links-UAV-MiniBench |
飞控代码自动化生成工具 | Links-AutoCoder-Gen | ||
飞控外设模型库 | Links-AutoCoder-DevLib | ||
Simulink实验示例包 | Links-UAV-SimulinkDemo | ||
模拟飞行软件 | Links-UAV- Flight Software | ||
四旋翼无人机(选配) | Links-UAV- MiniRealPlane | ||
LINKS-RS-UAV-01 (教学/科研) | 无人机实验台架 | Links-UAV-LargeBench | |
飞控代码自动化生成工具 | Links-AutoCoder-Gen | ||
飞控外设模型库 | Links-AutoCoder-DevLib | ||
Simulink实验示例包 | Links-UAV-SimulinkDemo | ||
模拟飞行软件 | Links-UAV- Flight Software | ||
四旋翼无人机(选配) | Links-UAV- LargeRealPlane | ||
六、部分用户
❉北京航空航天大学 ❉西北工业大学 ❉华东交通大学 ❉桂林航天工业学院 ❉中南大学 ❉重庆大学 ❉南昌航空大学 ❉北京理工大学 ❉中北大学 ❉北京联合大学 ❉海军航空大学 ❉台州学院 ❉滨州学院❉滇西科技师范学院 ❉北京信息科技大学 ❉广西大学 ❉西南交通大学 ❉中国科学院南海海洋研究所❉哈尔滨工业大学 ❉中山大学珠海学院 ❉华中科技大学 ❉昆明理工大学 ❉安阳工学院 ❉安徽工程大学 ❉国防科技大学
七、论文应用
1)SCI论文丨带指令滤波和事件触发的四旋翼无人机扰动观测器有限时间容错控制
2)SCI论文丨基于自适应滑模控制器的四旋翼无人机鲁棒追踪控制
3)SCI论文丨严重参数不确定性和完全未知扰动情况下四旋翼无人机系统通用自适应滑模控制