




教育方案
国内第一家小型化、原型化、场景化、标准化工业数字孪生平台厂商
六自由度机器人半实物实验平台(教学版)
1、概述
本平台以桌面级垂直串联六自由度机器人为被控对象,提供了半物理开发验证环境,在满足基本机器人示教操作的同时,可以对六自由度机器人的轨迹规划、空间插补算法、正/逆运动学解算等机器人学及其控制理论算法的本科教学提供实验支撑。平台提供完全开源的机器人运动学相关算例和培训文档,为高年级本科生的课程设计提供学习参考。

2、特征优势
(1)支持RCP快速原型设计
实现用户的MATLAB/Simulink仿真模型到嵌入式控制原型的自动转换;
(2)开发环境友好:
基于MATLAB Simulink开发机器人控制系统模型,极大降低了机器人控制系统设计的开发难度;
(3)桌面级机器人:
采用桌面级六轴机器人,相对工业级机器人六轴机器人具有相似的结构特征,且工程塑料材质更加安全,适合本科教学实验。
(4)机器人实现动作:
单关节动作、多关节联动、空间直线、空间圆弧、吸取物体并搬运等;
(5)多样化的调试手段
支持机器人控制器模型任意参数的在线修改、任意系统变量的在线监测,以及所有观测数据的实时存储、离线回放、数据导出等丰富的开发调试手段;
(6)开源示例
平台提供完全开源的机器人运动学相关算例和培训文档,为高年级本科生的课程设计提供学习参考。
3、实验内容
❋快速入门实验
❋机器人机械系统认识实验
❋机器人控制系统认识实验
❋机器人示教编程与再现控制
❋机器人坐标系建立
❋机器人正运动学分析
❋机器人逆运动学分析
❋机器人轨迹规划离线仿真实验
❋机器人空间直线运动实验
❋机器人搬运实验
4、实验示例
(1)机器人轨迹规划离线仿真实验
基于Matlab开发的六关节机器人的轨迹规划仿真软件sxTeach,为学生初步学习机器人轨迹规划和运动学正逆解算法提供了离线仿真环境。试验界面如下图所示,可以完成如下功能:
❋ 配置DH参数 ❋ 设置各个关节角度 ❋ 设置末端位置❋ 编辑运动轨迹 ❋ 轨迹规划
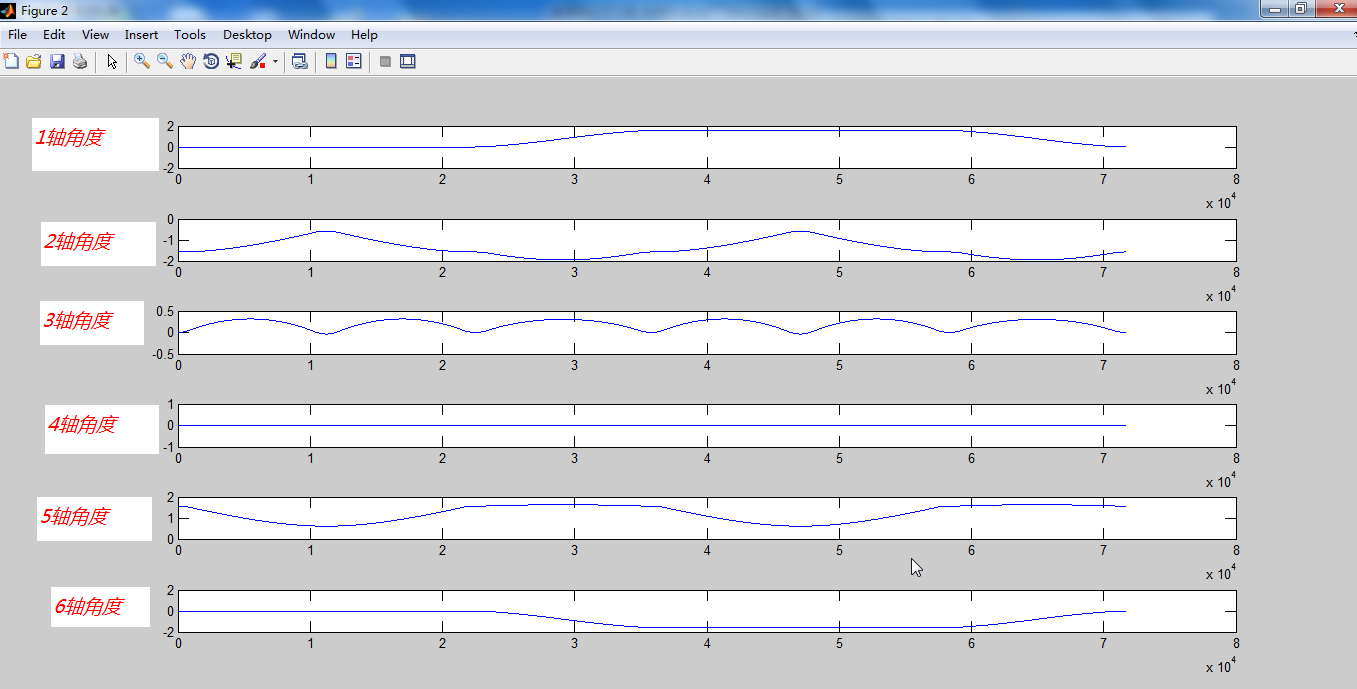
单击Profile按钮,执行轨迹规划操作,经过正逆解运算后,直接得到6个关节角度曲线。
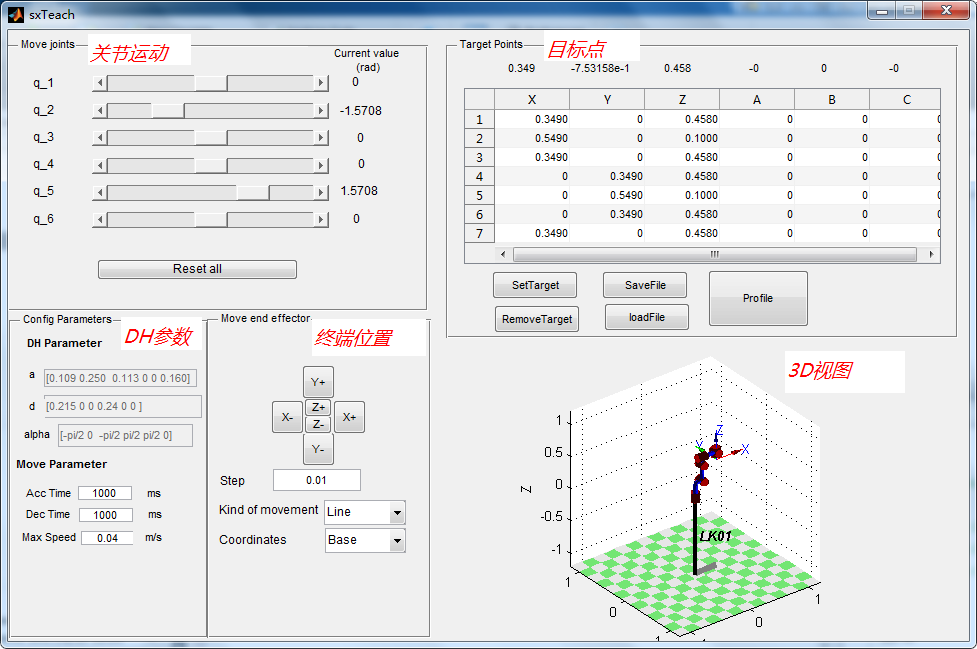
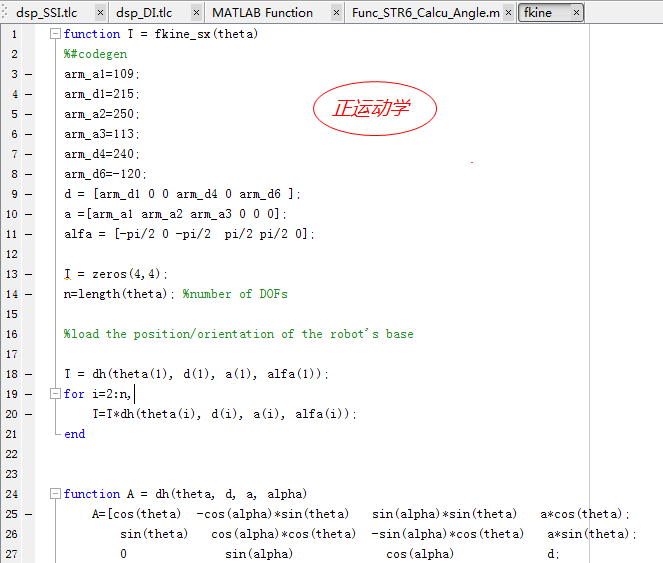
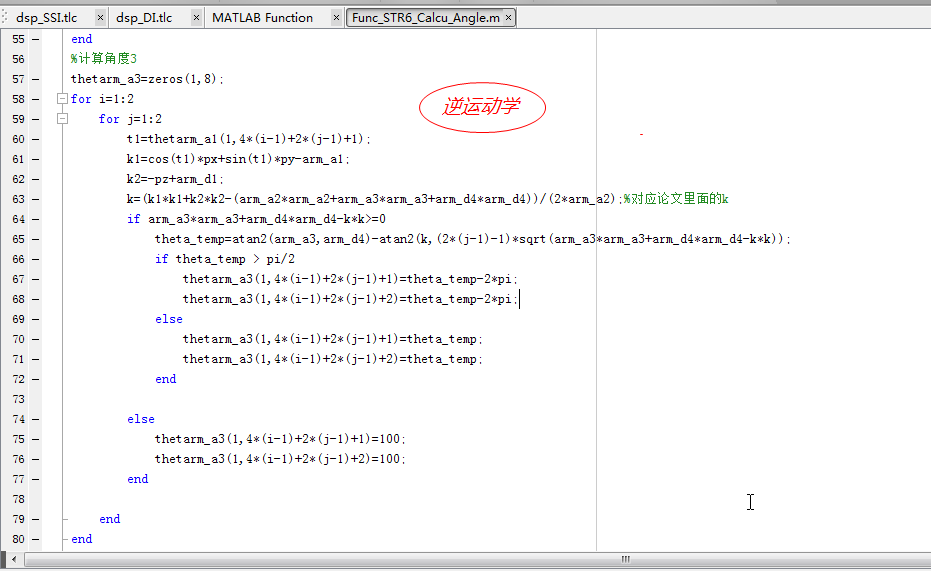
轨迹规划仿真软件sxTeach的后台运算采用M语言编写,且所有源代码均向用户开放。
(2)机器人空间直线运动仿真实验
在完成机器人离线仿真实验的基础上,本平台更多地是使用真实的机器人实物本体作为控制对象。用户基于Matlab Simulink可快速完成机器人控制算法的开发,经自动编译后生成VxWorks实时系统代码,最后实时代码部署到实时仿真器中运行,并通过多轴运动控制卡实现对机器人各关节的控制。
如下图所示,基于Matlab Simulink开发六关节机器人控制系统模型,包括了轨迹规划算法模型、逆运动学算法模型、单轴速度控制模型、六轴电机编码器反馈模型等。
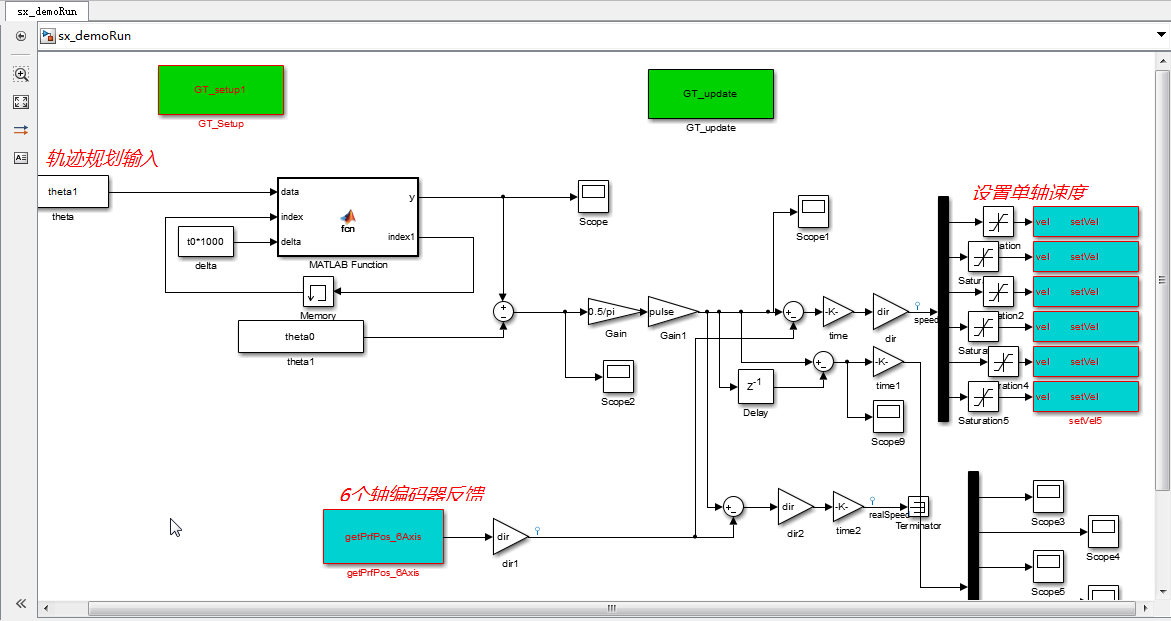
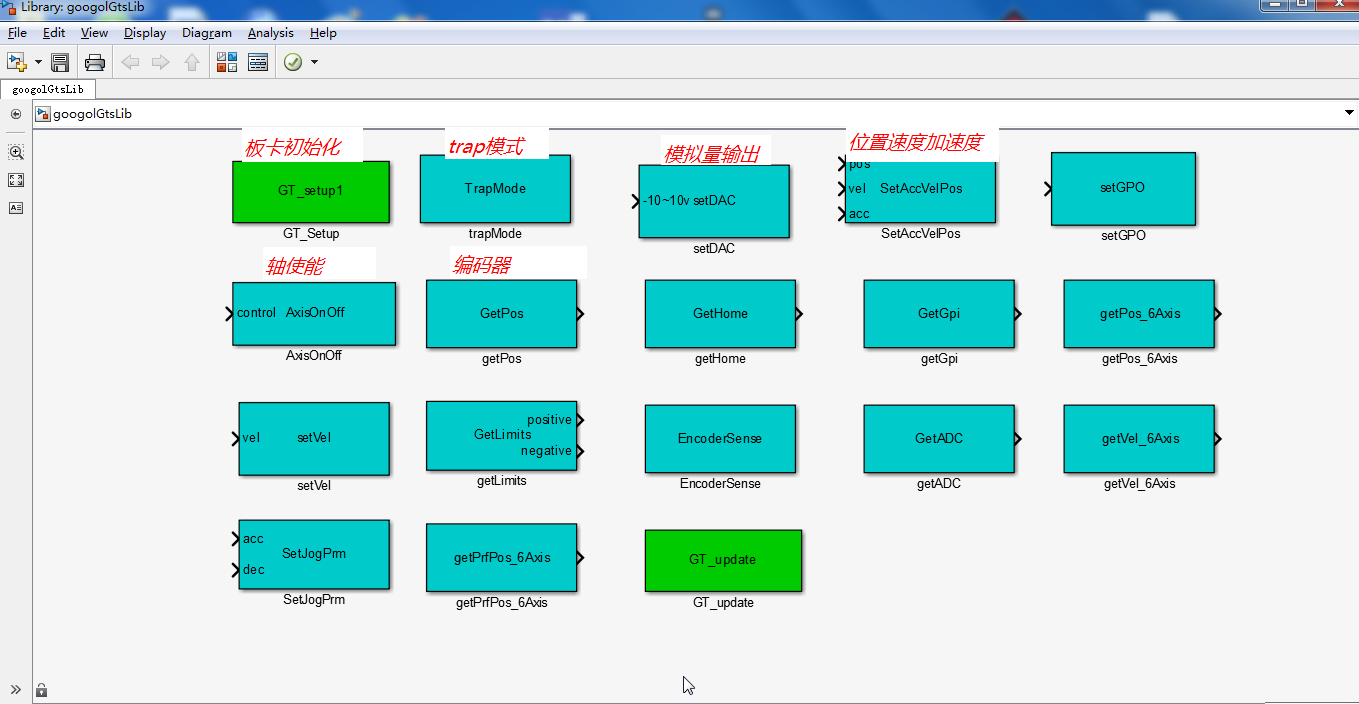
在六关节机器人控制系统模型中,我公司主要提供了控制算法示例模型和运动控制的硬件模型库。用户可基于本实验示例,任意替换机器人控制模型的各个算法模块,在无需关注底层软硬件接口实现的前提下,快速验证自己的机器人控制系统算法模型。
5、现有用户
❋北京交通大学 ❋中国科学院空间应用工程与技术中心 ❋青岛大学 ❋洛阳师范学院 ❋中南大学
❋上海理工大学 ❋上海工程技术大学 ❋北方民族大学 ❋北京航空航天大学 ❋江西理工大学