




教育方案
国内第一家小型化、原型化、场景化、标准化工业数字孪生平台厂商
交流永磁同步电机控制实验平台
1、概述
交流永磁同步电机控制实验平台为交流同步伺服控制系统的开发调试,提供半物理验证环境,可以对被控对象的电流环、速度环、位置环进行全环路控制器设计,可以为矢量控制、直接转矩控制等控制算法研究提供快速验证平台。

2、平台应用
(1)支持RCP快速原型设计
实现用户的MWorks、MATLAB/Simulink仿真模型到嵌入式控制原型的自动转换;
(2)平台应用
基于本平台,用户可进行伺服驱动调制方法研究(SVPWM)、控制算法研究(传统PI控制、分数阶控制、控自抗扰控制、滑模变结构制、反步控制等),参数辨识(最小二乘、相关辨识等)和自整定技术研究及其应用,以及无位置传感器控制技术研究及应用等;
(3)适用电机种类
交流永磁同步电机PMSM(当前配置)、交流异步电机ASM(可后续扩展);
(4)硬件资源
平台集成了实时仿真机(控制原型)、功率驱动模块、同步伺服电机对拖平台;
(5)DSP自动代码生成
支持Simulink模型转C语言源码的DSP代码自动生成功能;
(6)安全性
平台集成了过压、过流、刹车制动等硬件保护功能,以及PWM死区时间设置错误等软件保护功能,确保用户设备安全。
3、实验内容
Ø 伺服驱动器配置实验
Ø 多功能采集卡接口测试实验—编码器采集及转速计算
Ø 多功能采集卡接口测试实验—PWM输出
Ø 伺服电机开环控制实验
Ø 多功能采集卡接口测试实验—相电流采集及坐标变换
Ø SVPWM电压空间矢量算法验证实验
Ø 伺服电机电流环PI控制实验
Ø 伺服电机速度环和电流环PI控制实验
Ø 伺服电机带载测试实验
Ø 基于Simulink模型的DSP28335自动代码生成
Ø 高级算法试验:滑膜变结构控制,自抗扰控制,模糊PID控制,无速度传感器控制。
4、实验示例
(1)伺服电机速度环和电流环PI控制实验

如上图所示,可基于Matlab/Simulink搭建了针对PMSM的SVPWM控制系统模型,该模型包括编码器采集和转速计算、双环PI调节器、Park和Clarke坐标变换、相电流采集,以及带死区设置的PWM输出等。
该模型经过自动编译后,生成RTOS(实时操作系统)下可执行的实时代码,再部署到Links-Box实时仿真器中运行。Links-Box替代了伺服控制中的DSP控制板采集电机编码器和功率模块的电压、电流等信号,经模型解算后,对三相逆变桥输出3组互补型PWM控制信号。
(2)伺服电机速度环和电流环PI控制实验
在伺服电机DSP控制板的开发过程中,交杂着硬件、嵌入式软件和控制算法的调试。为简化设计流程,可直接将Simulink模型自动生成C语言控制源码,再由CCS软件和DSP仿真器将C语言源码烧写到DSP板卡中执行。
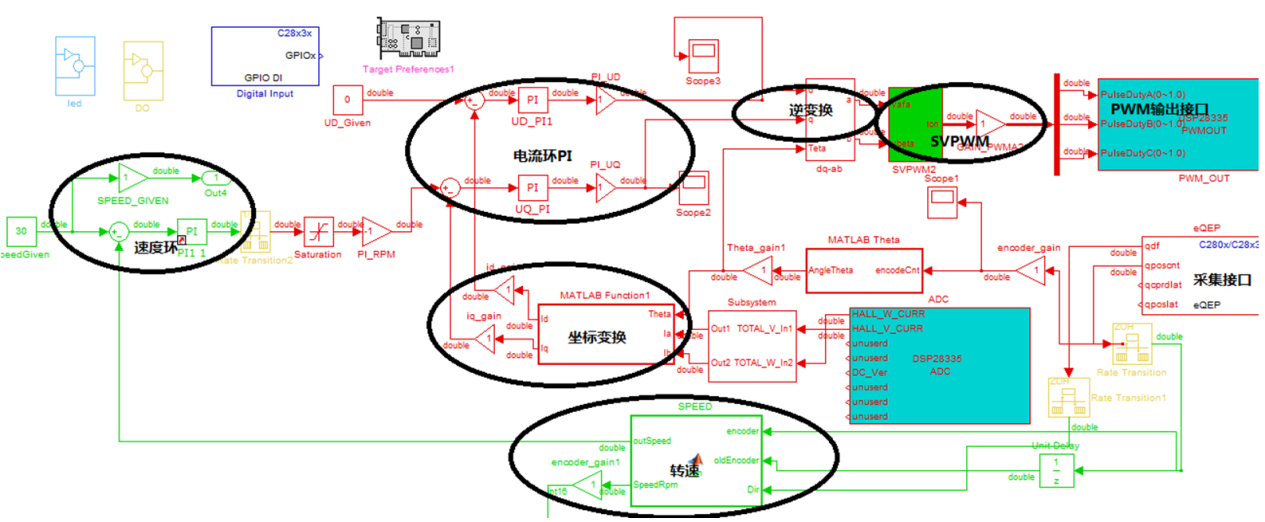
如上图所示的模型中,搭建了伺服控制的闭环控制回路(电流环和速度环),实现交流伺服调速功能。模型主要包括DSP28335的DIO、ePWM、外部AD采集(相电流和直流母线电压)、eQEP(增量式光电编码器采集)等接口。
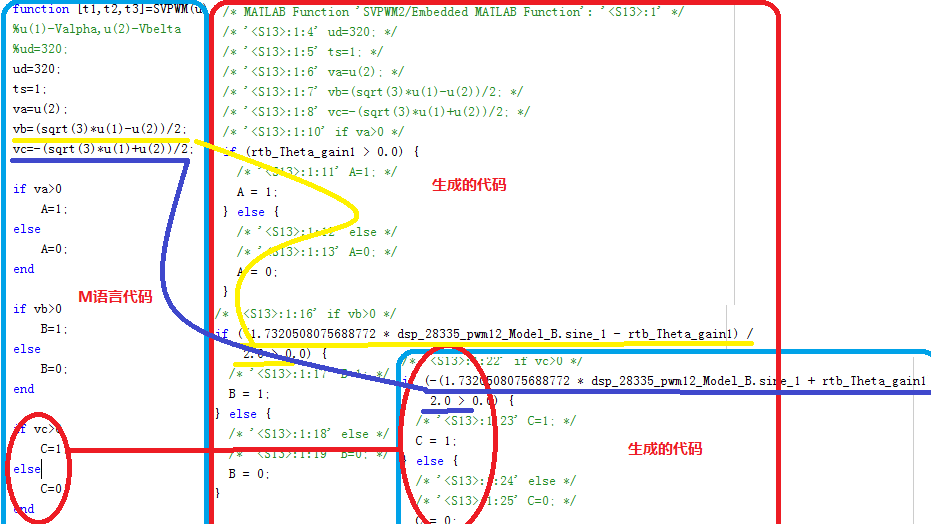
在Simulink控制模型中,除了使用基础模块外,还可以直接使用M语言来描述算法逻辑部分,这种结合Simulink的框架结构和M语言的高效性,使得开发效率最优。下图以SVPWM波形发生器为例,展示了仿真用的M语言代码与自动生成的DSP控制源码对比。
5、选型配置
产品名称 | 产品型号 | 系统配置 | |
交流永磁同步电机控制实验平台 | LINKS-RS-PMSM-01 | ||
多功能采集卡 | Links-IPC-DAQ-04 | ||
同步电机对拖平台(400W) | Links-PMSM-01 | ||
同步电机对拖平台(1.5kW) | Links-PMSM-02 | ||
六、部分用户
❉北京理工大学 ❉北京航空航天大学 ❉沈阳工业大学 ❉青岛大学 ❉江南大学 ❉泰州学院 ❉济宁学院 ❉洛阳师范学院 ❉河南理工大学 ❉山东科技大学 ❉江苏科技大学 ❉上海理工大学 ❉火箭军工程大学❉中国石油大学(北京)❉上海新力动力设备研究所 ❉沈阳工程学院 ❉河北大学 ❉机械工业仪器仪表综合技术经济研究所 ❉曲阜师范大学
七、应用案例
2)SCI论文-基于嵌入谐振多项式和扰动观测器的改进无差拍预测电流控制策略的研究
4)SCI论文丨一种高集成度的形状记忆合金作动器及基于位置补偿的精密自感知跟踪控制