




工业方案
基于正向设计方法论MBSE,服务于国防军工、商业航天、汽车、能源电力及工厂自动化等行业。
综合试验飞行仿真系统
1、概述
该设备用于飞行控制系统地面模拟试验中,用来解算飞机的动力学方程以及实现与飞行控制系统物理部件的信号交联,构成一个完整的半实物实时仿真试验环境。同时飞行仿真系统具备数据采集、存储、处理能力,以支持仿真试验的需要。
对于一个复杂、全面的飞行控制系统地面模拟试验环境,通常需要多台实时仿真系统来进行同外部系统接口、交换数据,并进行大量复杂模型的解算。考虑到实际飞机的规模和试验室布局的要求,配备2台仿真计算机构建分布式仿真系统,完成相应的I/O 和模型解算,分为主仿真节点和次仿真节点。该系统仿真周期能够达到0.5毫秒,支持分布式实时仿真,主次仿真节点时钟统一、同步。
仿真系统采用实时操作系统,满足实时任务对时间的限制和要求。支持各种流行的建模工具如C/C++、Simulink、MWORKS。提供API接口包括I/O接口实时API,支持二次开发。支持用户自行开发的板卡和自行编写驱动。采用标准体系总线如cPCI,支持扩展新的仿真节点,支持增加多个实时仿真计算机,且无需更改原有系统。支持扩展新的I/O接口等在I/O接口方面,可以通过增加板卡来扩展I/O。支持通过增加CPU来扩展计算能力。
2、系统结构
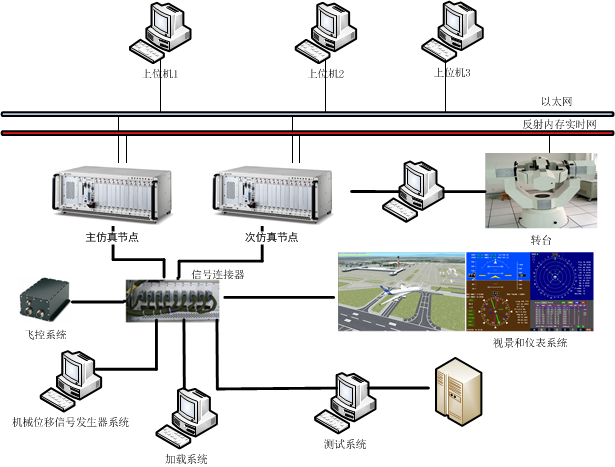
综合试验飞行仿真系统主要由主、次仿真节点和三台上位机构成。主次节点主要用来解算飞机的动力学方程以及实现与飞行控制系统物理部件的信号交联,构成一个完整的半实物实时仿真试验环境。三台上位机用来完成飞机动力学模型的设计以及对仿真试验的管理工作,其他系统诸如机械位移信号发生器系统、加载系统、测试系统、视景和仪表系统、转台等作为综合试验飞行仿真系统的配套地面设备,配合仿真系统完成地面飞行仿真试验。
系统采用分布式结构,主仿真节点、次仿真节点以及转台等通过反射内存实时网络相连,构成强实时仿真回路。视景和仪表系统通过以太网与实时仿真系统连接。
3、支持软件
RT-Sim是系统的关键支持软件,提供了Matlab Simulink建模环境与分布式实时目标机之间的无缝连接。
RT-Sim仿真管理软件包在Matlab Simulink建模环境中集成了Simulink模块库、RT-MP分布式仿真组件及RTOS目标代码生成组件。利用这些模块及组件,用户能够方便的建立硬件在环的飞行动力学模型;RT-MP能够自动进行Simulink模型拆分,并编译成多处理器目标代码。
RT-Sim主控软件支持建立多处理器仿真工程,自动向多个目标机处理器下载代码,实现多目标机同步启动与运行,并对实时仿真过程进行监视、在线调参及数据记录。
同时,RT-Sim主控软件还提供可定制的虚拟仪表生成界面,支持用户自定义监视界面。
4、系统特点
(1)系统构成完整的综合试验飞行仿真系统的仿真环境,能够对飞行器动力学模型提供设计、仿真支持,实现对飞控系统的测试与验证。
(2)支持基于模型的设计方法,支持用户基于MWORKS、Simulink进行模型算法设计,并自动生成多目标机分布式实时代码。能够实现数学仿真阶段到半实物实时仿真阶段的平滑过渡。
(3)系统提供图形化全流程仿真管理支持,包括分布式多处理器代码自动生成、代码下载、仿真运行控制、图形化状态监视、在线参数调节等功能。
(4)系统支持单节点仿真和多节点的分布式仿真两种模式,并提供RT-Sim软件方便的支持单节点、多节点的试验管理模式。