



资讯
加速工程及科技创新,让智能装备的设计研发更简单高效
深度解析四旋翼无人机飞控原理及方法
飞控是什么? 飞行控制系统(Flight control system)简称飞控,可以看作飞行器的大脑。多轴飞行器的飞行、悬停,姿态变化等等都是由多种传感器将飞行器本身的姿态数据传回飞控,再由飞控通过运算和判断下达指令,由执行机构完成动作和飞行姿态调整。

飞控可以理解成无人机的CPU系统,是无人机的核心部件,其功能主要是发送各种指令,并且处理各部件传回的数据。类似于人体的大脑,对身体各个部位发送指令,并且接收各部件传回的信息,运算后发出新的指令。例如,大脑指挥手去拿一杯水,手触碰到杯壁后,因为水太烫而缩回,并且将此信息传回给大脑,大脑会根据实际情况重新发送新的指令。
无人机的飞行原理及控制方法(以四旋翼无人机为例)
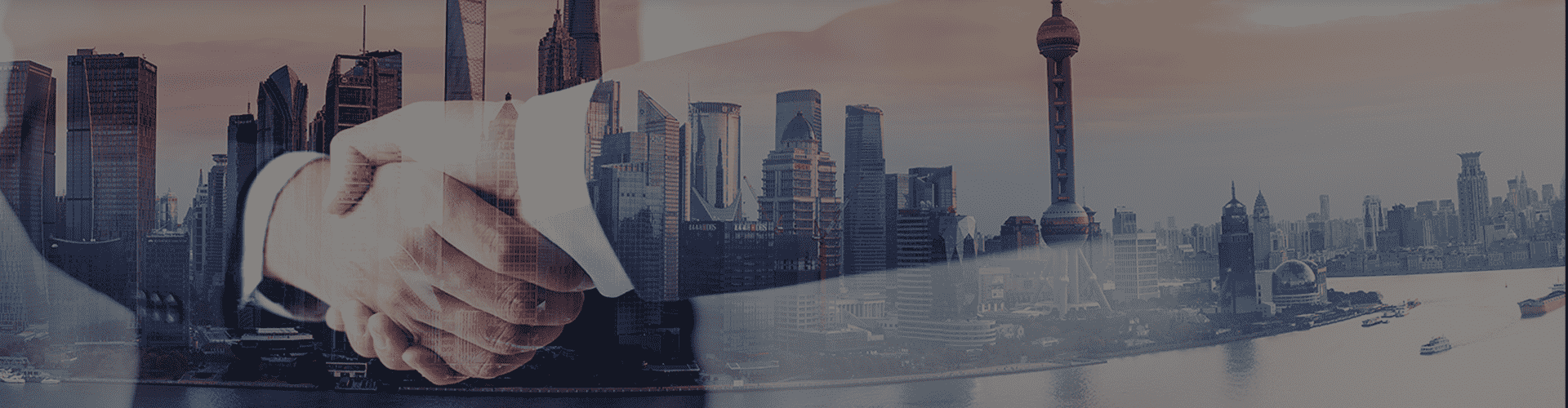
无人机的飞行原理及控制方法(以四旋翼无人机为例) 四旋翼无人机一般是由检测模块,控制模块,执行模块以及供电模块组成。检测模块实现对当前姿态进行量测;执行模块则是对当前姿态进行解算,优化控制,并对执行模块产生相对应的控制量;供电模块对整个系统进行供电。
四旋翼无人机机身是由对称的十字形刚体结构构成,材料多采用质量轻、强度高的碳素纤维;在十字形结构的四个端点分别安装一个由两片桨叶组成的旋翼为飞行器提供飞行动力,每个旋翼均安装在一个电机转子上,通过控制电机的转动状态控制每个旋翼的转速,来提供不同的升力以实现各种姿态;每个电机均又与电机驱动部件、中央控制单元相连接,通过中央控制单元提供的控制信号来调节转速大小;IMU惯性测量单元为中央控制单元提供姿态解算的数据,机身上的检测模块为无人机提供了解自身位姿情况最直接的数据,为四旋翼无人机最终实现复杂环境下的自主飞行提供了保障。
现将位于四旋翼机身同一对角线上的旋翼归为一组,前后端的旋翼沿顺时针方向旋转,从而可以产生顺时针方向的扭矩;而左右端旋翼沿逆时针方向旋转,从而产生逆时针方向的扭矩,如此四个旋翼旋转所产生的扭矩便可相互之间抵消掉。
由此可知,四旋翼飞行器的所有姿态和位置的控制都是通过调节四个驱动电机的速度实现的。
灵思创奇四旋翼无人机实验平台概述
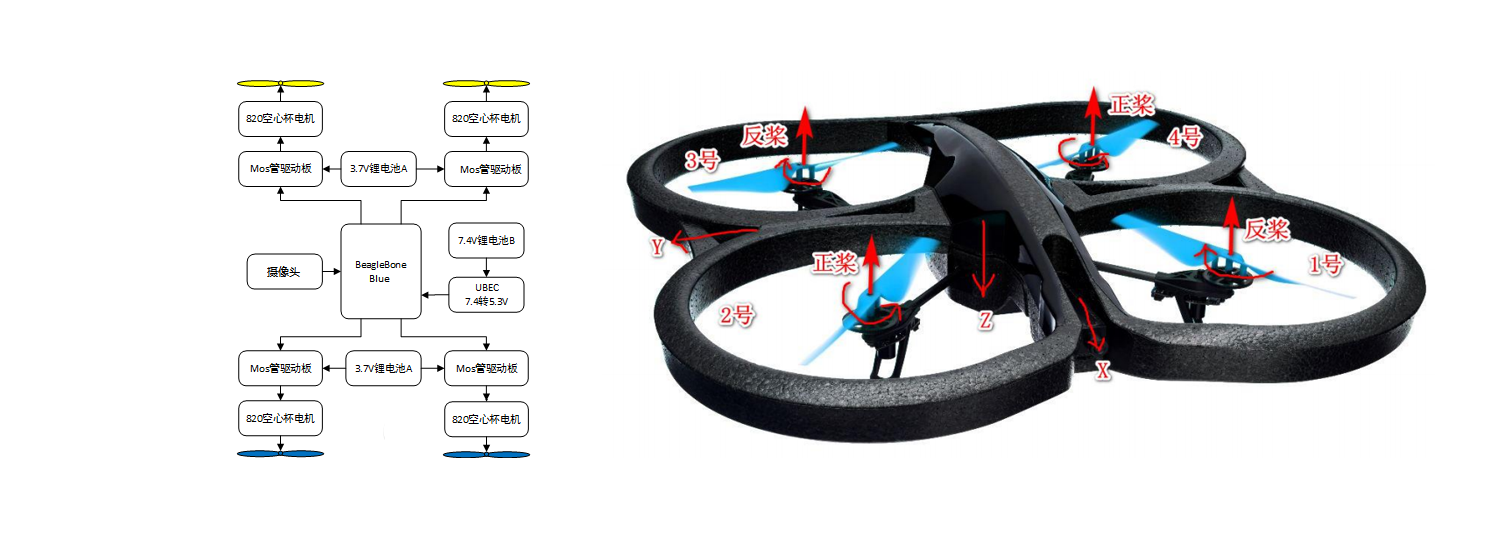
四旋翼无人机实验平台(LINKS-ES-RUAV-01)是集教学与科研目的为一体的多功能实验台,其在满足日常学生教学实验的同时,兼顾无人平台姿态控制、制导导航、力学等学科专业的科学研究。本平台采用先进的基于模型的设计思路,可支撑控制系统数学仿真、半实物仿真、台架实验、外场实验,具备模型编译、下载、数据监视记录、后处理等完成的工具软件,能够帮助学员熟悉整套控制系统设计流程。
灵思创奇四旋翼无人机实验平台优势介绍
1、同时支持台架实验和实际飞行实验;
2、主控芯片采用功能强大和扩展性强的芯片32位处理器 ARM Cortex A8 (主频1G Hz, 800MHz video DSP),拥有丰富的外设资源和强大的运算能力;
3、具备前置摄像头,结合专用图形处理芯片,能够完成图像采集和实时处理;
4、结合基于MATLAB 和ARM的快速控制原型系统的使用,可以快速实现控制器的开发,自动代码生成;
5、模块化的硬件设计,以及完整的底层软件驱动代码,方便用户进行二次开发以及先进控制算法研究。