1.
Platform
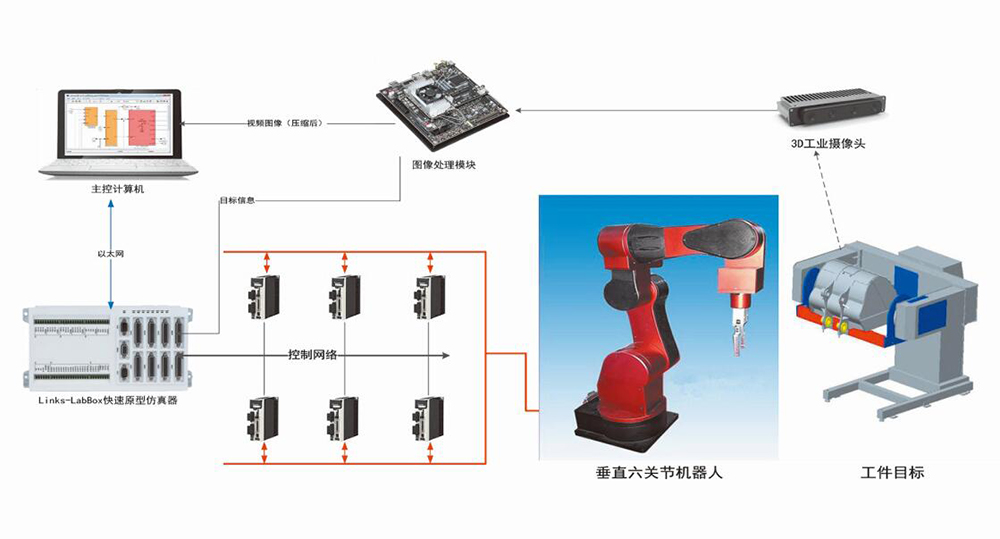
Introduction
The cascade SDOF mechanical arm (teaching
version) mainly consists of a fast control prototype system, teaching-version
six-axis robot, and image collection and processing units. It can realize
target image recognition and information extraction, robot dynamic trajectory
planning, positive/inverse kinematics calculation, and six-joint motion control
functions. It can fulfill preset experiment tasks such as sorting, capture,
transport, etc.
2. Platform Features
-
User-Friendly Development Environment: The platform, based on Matlab Simulink, develops robot control system models, which greatly reduces the difficulty in learning robot control system design;
-
Excellent Platform Timeliness: The control program runs on the VxWorks real-time OS, and its timeliness can reach the 100us level;
-
Teaching-Version Six-Joint Robot: Axis 1 and axis 2 use servo motors, whereas axes to 6 use stepping motors; each axis use a planetary reducer, with the precision of up to 0.5mm, thus realizing an overall balance in costs and performance;
-
Diverse Debugging Methods: Supports various development debugging methods, such as online modification of any controller model parameter, online monitoring of any system variable, and real-time storage, offline playback and data export of all observation data.
-
Open-Source Examples: The platform provides fully open-source examples and training documents about robot kinematics and image recognition, giving students reference examples for curriculum design.
3. Experiment Contents
l Entry-level
experiment contents:
-
Quick
start experiment;
-
Robot
mechanical system knowledge experiment;
-
Robot
control system knowledge experiment;
-
Robot
teaching programming and playback control;
-
Robot
coordinate system establishment
l Medium-level
experiment contents
-
Robot
forward/inverse kinematics analysis;
-
Robot
trajectory planning offline simulation experiment;
-
Robot
space linear and circular motion experiment;
-
Robot
transport and assembly experiment;
l Advanced-level
experiment contents
-
Binocular
camera lens parameter calibration experiment;
-
Robot
visual measurement and positioning experiment;
-
Robot
target tracking experiment.
4. Model Selection and
Configuration
|
Product
Name
|
Product
Model
|
System Configuration
|
|
Cascade
SDOF Mechanical Arm (Teaching Version)
|
LINKS-ES-6DOF-01
|
Fast
prototype simulator
|
Links-LabBox
|
|
Real-time
simulation software package
|
Links-RT
|
|
Teaching-version
6DOF robot
|
Links-M6DOF
|
|
Robot
experiment table
|
Link-M6DOF-Table
|
|
Three-dimensional
industrial camera
|
FM810-I
|
|
Image
capture and processing module
|
NVIDIA
Jetson TX2
|

