

一、基本信息
上海理工大学·健康科学与工程学院,研究方向:康复机器人
发表于IEEE TRANSACTIONS ON AUTOMA TION SCIENCE AND ENGINEERING。影响因子:2.733
二、研究背景
等速运动是一种科学有效的人体运动系统康复训练方法。等速运动可以促进神经活动的协调,训练肌肉的收缩能力。等速肌力训练是等速运动与康复训练相结合形成的一种康复训练方法。在等速训练设备人机交互的过程中,由于负载扭矩的变化,系统会产生脉动和较大的速度波动。高精度速度控制是等速训练设备(IMSTE)的关键。对于速度控制中存在的不确定性,现有的处理方法主要包括基于干扰观测器的控制方法、自抗扰控制、鲁棒控制和内模控制。 观测器是状态估计的有力工具,扩展状态观测器(ESO)可以准确估计系统的不确定性能。自抗扰控制(ADRC)可以处理系统无法精确建模的干扰。自抗扰控制器使用ESO实现干扰的实时跟踪和补偿。自抗扰控制器作为一种可以在不建立精确模型的情况下实现良好控制的算法,已用于各种平台的速度控制,例如线性感应电机、单轴框架机构和流体驱动装置。自抗扰控制器在使用受控机械手的肢体康复训练实验中取得了令人满意的鲁棒性。基于实时干扰估计和补偿的方法有效地解耦了建模不确定性。然而,非线性自抗扰控制算法的理论分析很困难,参数设置很复杂,一些参数没有明显的物理意义。为了解决这个问题,引入了线性自抗扰控制器。田提出了自抗扰控制器的频域分析。对于LADRC,基于闭环增益和干扰抑制的频域分析方法可用于调整参数。扩展状态观测器(ESO)为实时估计和补偿系统不确定性提供了有效的解决方案。ESO可以跟踪低频外部干扰,在不确定系统中可以严格证明ESO的收敛性。线性扩展状态观测器(LESO)继承了ESO的核心思想,易于调整参数;因此,它适合于工程应用。
三、论文内容简介
等速肌力训练是一种能有效改善肢体运动功能障碍、增强关节肌力的康复疗法。在主动等速训练中,如何合理规划速度,提高速度控制性能以适应个性化需求,是等速肌力训练设备控制的核心问题。在本研究中,提出了等速肌力训练设备的控制策略,该策略识别用户的运动意图,并根据用户的运动参与程度进行速度规划,使设备产生动态阻尼效果。这确保了用户和设备之间的主动交互,并满足肘关节肌力训练的力-速度要求。为了处理训练过程中的不确定干扰,使用线性扩展状态观测器估计干扰项,并使用跟踪微分器和非线性误差反馈控制来提高速度跟踪性能。实验结果表明,该控制方案在等速肌力训练中提高了速度控制性能。
四、创新内容与工程应用价值
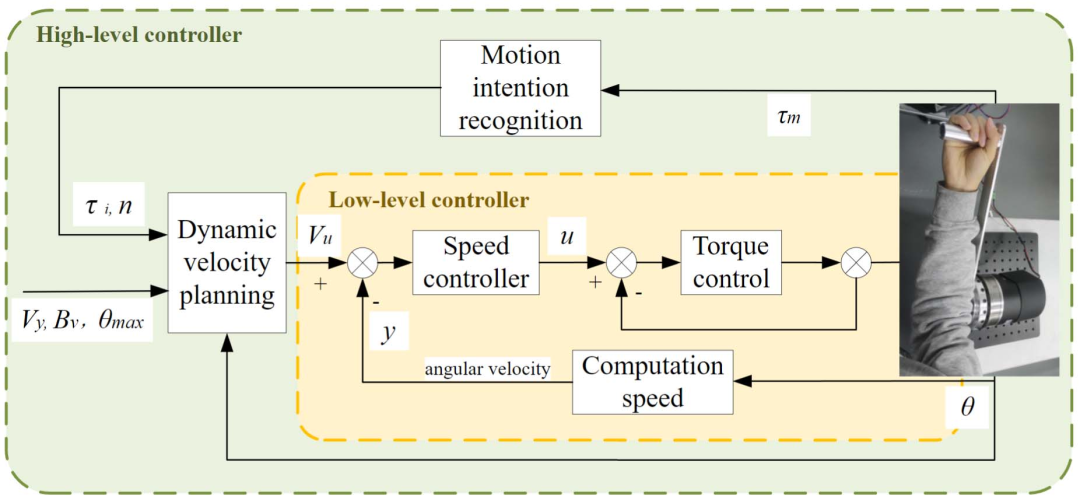
根据等速肌力训练的需要,以肘关节主动等速训练为例。本研究结合等速训练的康复机制和运动特点,提出了IMSTE的运动控制策略。首先,根据用户预测的肘关节肌肉扭矩,实现基于人体运动意图识别的动态速度规划,并由设备产生动态阻尼效应。在与用户交互的过程中,用户产生的干扰力会作用在设备上,等速训练设备中也存在许多不确定性。在本研究中,外部干扰和用户的内部不确定性被视为干扰。通过二阶线性扩展状态观测器(SLESO)跟踪和补偿干扰,并使用自适应增益调整反馈误差,以提高速度控制的精度和抗干扰能力。与以往工作相比,本研究的主要贡献如下。首先,该控制方法通过识别肢体的生物力学行为来判断用户的运动意图。根据运动意图规划速度,以解决启动过程中的加速度和冲击问题。在训练过程中,设备的动作符合用户的动作,完全实现等速肌力训练。其次,考虑到人机交互过程中等速训练设备中外部干扰和不确定因素的影响,设计了基于SLESO的速度控制器,以获得更高的速度跟踪能力和抗干扰能力。本研究为有兴趣开发等速康复训练控制系统的从业者提供了一种方法。
五、灵思创奇设备价值
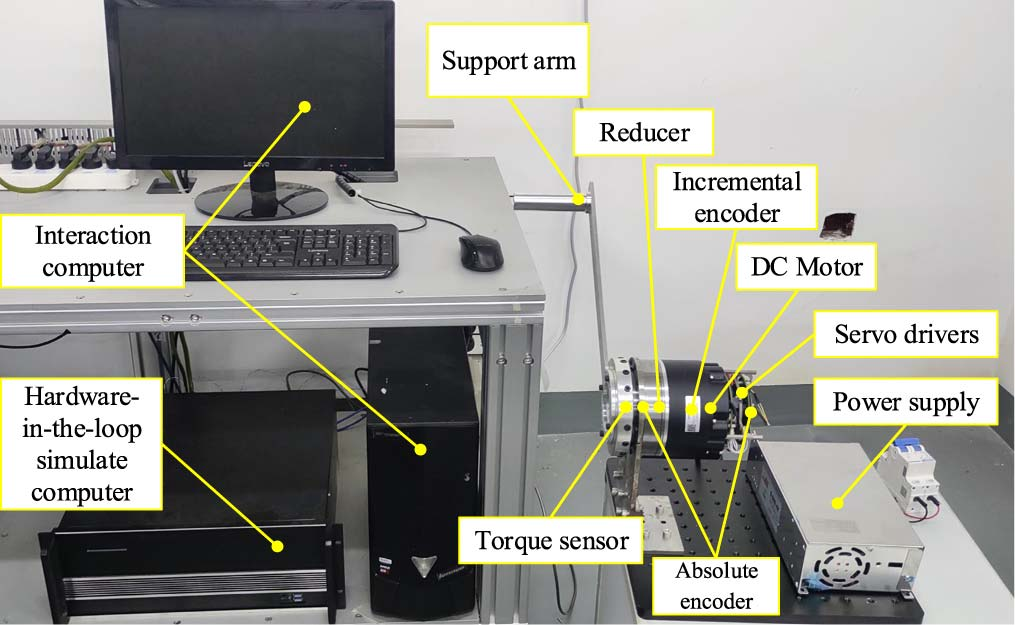
灵思创奇的电机控制半实物仿真平台可以将基于线性扩展状态观测器的等速肌力训练系统速度抗扰控制策略快速原型化,使我们专注于算法研究。半实物平台中易用的CAN总线接口可以将控制指令下发至电机控制器,迅速的验证算法性能。