

成功案例
灵思创奇基于工业标准为用户开展多学科、多领域的半实物仿真测试工作提供平台支撑工具
您当前的位置:
论文案例:基于自适应反步方法实现永磁同步电机位置控制
2019-02-27 17:36:00
1307
挑战
针对负载转矩未知的永磁同步电机系统的位置跟踪问题,青岛大学科研团队提出了一种新型自适应反步控制方法。提出了一种新型负载转矩自适应律,将其与传统自适应律、龙伯格观测器进行了对比,基于提出的新型负载转矩自适应律,实际得到自适应反步位置跟踪控制器。
解决方案
负载转矩未知的永磁同步电机系统的位置跟踪问题,关键技术研究在于如何进行对比。首先,基于位置误差和转矩估计误差得到新的负载转矩自适应律。然后,基于估计的负载转矩设计得到自适应反步控制器。
利用Lyapunov稳定性原理,验证了系统的渐近稳定性。新的负载转矩自适应律保证了负载转矩的准确估计,提高了负载转矩估计的收敛速度。所设计的控制器提高了位置跟踪性能,保证了闭环系统的稳定性。
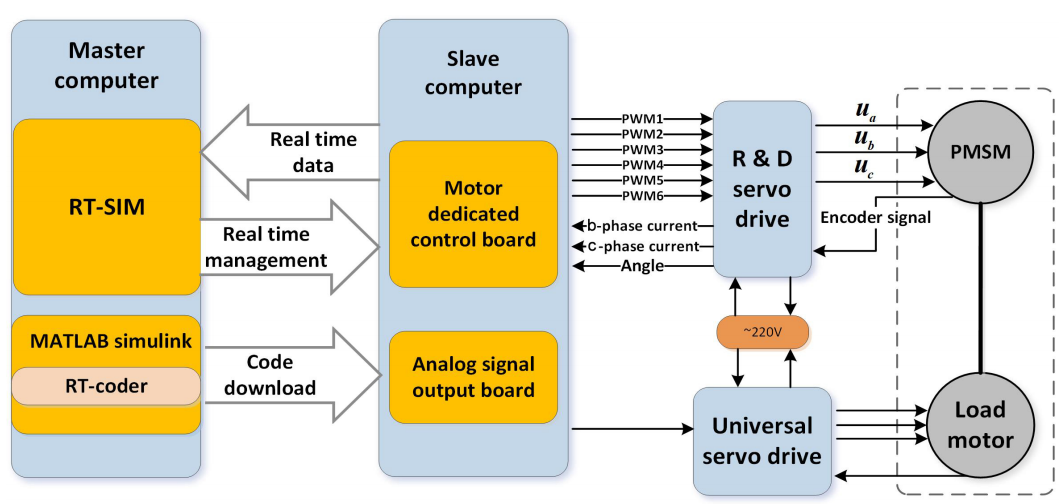
实验系统配置图
最后,基于LINKS-RT半实物仿真实验平台进行实验验证,实验结果表明该控制方法具有良好的位置跟踪和抗负载转矩扰动性能。
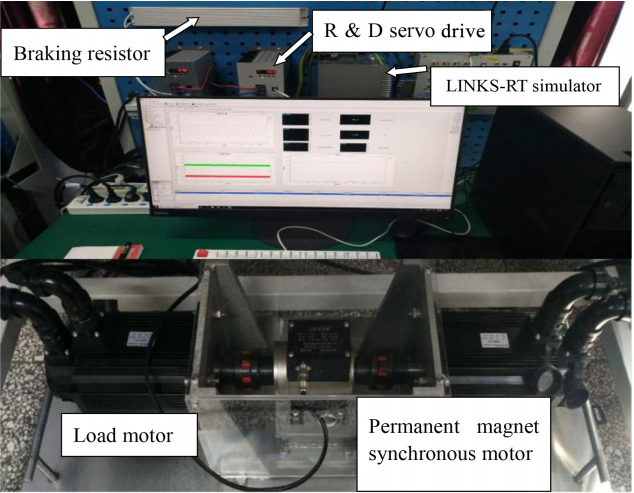
实验项目平台
灵思创奇设备科研价值
论文中的实验部分完全基于LINKS—RT半实物仿真实验平台,对实验验证起到重要作用。这种方法研究的价值在于可以实现转矩的更快更精准控制,位置控制更精确。
相关推荐
成功案例
航天案例
航空案例
兵器案例
工程机械案例
工业自动化案例