

成功案例
灵思创奇基于工业标准为用户开展多学科、多领域的半实物仿真测试工作提供平台支撑工具
您当前的位置:
论文案例:轮廓跟踪任务中任意自由曲线路径轮廓误差的三阶估计方法
2020-01-06 14:31:00
673
基本信息:
哈尔滨工程大学·机电工程学院,发表于Precision Engineering
论文内容简介:
在多轴联动运动控制系统中,由于伺服迟滞、外部扰动等因素,会导致实际运动轨迹与理想轨迹之间产生轮廓误差,因此控制该误差对运动系统轮廓跟踪精度至关重要。轮廓误差的实时估计是对其进行有效控制的前提,估计精度直接影响控制效果。本文针对这一问题,提出一种三阶轮廓误差实时估计方法,实现了对任意自由曲线路径轮廓跟踪过程中轮廓误差的实时高精度估计。
论文创新点
提出了一种用于多轴联动轮廓跟踪控制的三阶轮廓误差实时估计方法,不仅能够在实时性条件下准确估计轮廓误差,还适用于任意自由曲线轨迹。
论文工程应用价值
多轴联动轮廓跟踪任务在工程中常见于数控机床、机械臂等。本文研究的轮廓误差估计方法有利于提高多轴联动轮廓跟踪精度,从而可以在工程上应用于提高数控机床加工精度以及机械臂的操作精度等领域。
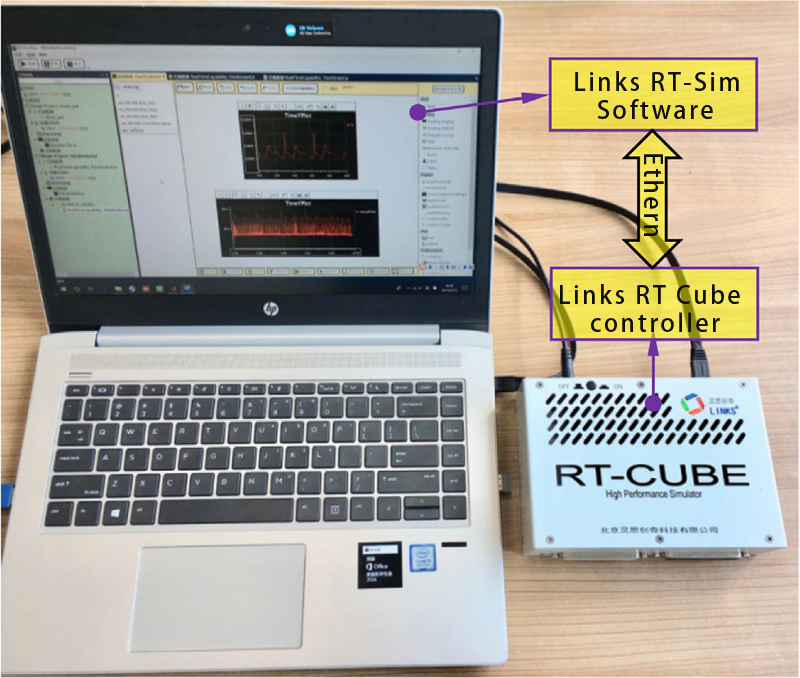
灵思创奇设备发挥的科研价值
灵思创奇RT-CUBE控制器具有监控各采样周期算法实际执行时间功能,利用这一功能研究了算法计算复杂度,验证了本文提出算法的实时性,极大节约了实验耗时验。
相关推荐
成功案例
航天案例
航空案例
兵器案例
工程机械案例
工业自动化案例